Robotik
Von Manuel Magnin, Mail: Info(a)Clinch.ch
Inhalt:
1. IR-Empfänger, zur Remotesteuerung von Roboter
2. Servo Kontroller, um die CPU zu entlasten
vom PWM
3. H-Brücke, zur PWM Ansteuerung der
Antriebsmotoren
3.1 Battery Monitor (Akku überwachung)
3.2 Speed Controler
4. Metall Detekor Sensoren und mechanische Endschalter
5. Steuer Computer, warum kein NoteBook Motherboard
6.
7. Software und Abläufe
Robotik - Fahrzeuge mit etwas eigener Intelligenz
Hier einige Beispiele, Fotos und Anleitungen zum Selbstbau
1. IR-Empfänger, zur
Remotesteuerung von Roboter
GrundIdee: Eine Empfangsschaltung die den
UART der RS232 Schnittstelle nutzt
Speziell: Bei der zweiten Schaltung die einen
RC5 Code empfängt ist speziell, dass der RC5 Code nicht direkt
entschlüsselt werden kann, da der Code durch die Start und Stop
Bits des Seriellen registers teils vernichtet werden. Die
Datenrate des RC5 Codes ist knapp 600BPS, da aber die dignale in
der Polarität wechseln muss mit dem Doppelten gefahren werden
1200BPS. Die 18 Bits des RC5 Code werden so zu ca. 36Bits, es
sind also jeweils 5 Byte die zusammen gehören wenn sie Zeitlich
direkt aufeinander folgen.
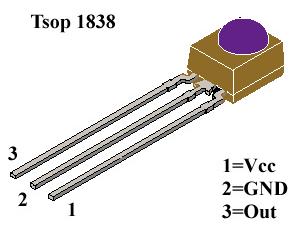
Weiter ist wichtig, dass der IR-Empfänger IC keine zu hohe
Stromaufname hat, da sonst das Signal am RxD zu niedrig
ausfällt.
Die komplette Elektronik kann direkt in das D-Sub-9
Steckergehäuse eingebaut werden
SFH5110.pdf BC547.pdf
1N4007.pdf TSOP.jpg
WiderstandFarbCode LM78L05.pdf
2. Servo Kontroller, um die
CPU zu entlasten vom PWM
Grundidee: Die Ansteuerung von Servos
kann kann eigentlich durch die CPU erfolgen ein PWM (Puls Weiten
Moduliertes) Signal kann eigentlich jede CPU auch noch nebenbei
erledigen. Jedoch ist zu bedenken, dass jeder Kontroller die CPU
entlastet. Desshalb wird im PC auch für jedes Peripherie-Gerät
ein Kontroller eingesetzt. (Tastatur. Maus, Festplatte, RS232,
Timer, IRQ-Kontroller, usw...
Speziell: An der unten aufgeführten Schaltung
ist speziell, dass der LadeStrom für den Puls nicht vor der
Anode der Diode 1N914 gesetzt wie dies sein sollte condern wurde
beim mit * Markierten Wirderstand angehängt. Nachteil, die
Grundfrequenz wariiert leicht beim verschiedenen Puls längen
(nur 2%) und dies ist bei Servos nicht relevant. Durch diesen
Umbau kann stromgesteuert das Pulstiming angepasst werden. Der
mit * gekennzeichnete Widerstand ist im mit einem Bereich von
2.2k bis 4.7k für ein PWM Signal von 1mS bis 2.5mS zuständig.
D.h. bei D0-D5 auf logisch null wird der Kondensator mit dem 4.7k
Widerstand geladen. Wenn alle Datenleitungen D0-D5 auf logisch
eins liegen, so sind alle Ladewiderstände parallel,
(4.7k+10k+22k+39k+82k+150k+330k) ergibt ca. 2.2k also 1mS
BC547.pdf 1N4007.pdf
TSOP.jpg WiderstandFarbCode
NE555.pdf
3.
H-Brücke, zur PWM Ansteuerung der Antriebsmotoren
Grundidee: Die Ansteuerung von
DC Motoren mittels PWM. Die Frequenz sollte im Bereich von
50-300Hz liegen. Geeignet für Motoren von 24V und 5-10Amp. Für
grössere Leistungen müssen genügend starke Transistoren
verwendet werden!
Speziell: An der unten aufgeführten Schaltung
ist speziell, dass gegen Masse N-Kanal PowerMOSFET Transistoren
verwendet wurden. Dies hat den Vorteil, dass bei Typen mit
RDS-ON<50mOhm minimale Verluste anfallen! Gegen plus 24V
wurden PNP Transistoren verwendet nur der einfachheit halber. Es
sollten bei diesen Leistungen keine Darlington verwendet werden!
(0.8V*10Amp*2=16Watt Verlust). Weiter ist zu beachten, dass die
FET's LogicLever Kompatibel sind, dann können diese mit 5V Logik
Bausteinen angesteuert werden. (Es ist auch keine negative
Löschung notwendig).
Weiter wurde mit den zwei BC547 erreicht, dass die H-Brücke
durch ein A=B=1 nicht zerstört werden kann.
BC547.pdf BUK101-50GL.pdf
BUK9512_55B.pdf BUK9518-30.pdf BUZ104.pdf
MJE2955T.pdf BTS141.pdf
WiderstandFarbCode PHP55N03LTA-04.pdf BD744.pdf
3.1 Battery Monitor (Akku
überwachung)
Grundidee: Um den Zustand der Akkus zu
überwachen muss die spannung gemessen werden. Messbereich 22.5V
bis 26V. Bei Messung mit und ohne Last kann der Zusand der Akkus
festgestellt werden.
Speziell: Analog Digital Wandler diskret
aufgebaut...

74HC147.pdf LM324.pdf
WiderstandFarbCode LM78L05.pdf
3.2
Speed Controler
Grundidee: Da die Motoren die mittels des PWM
Signales gesteiert werden eine Lastabhängige Touren Zahl haben
ist es von Vorteil die Umdrehungsgeschwindigkeit zu messen.
Insbesondere, wenn mit zwei Motoren ein Antrieb zur Steuerung
realisiert wurde.
Speziell: Geber sind REED-MAGNET-KONTAKTE wie
sie in redd relais verwendung finden. 2x4Bit Zähler um die CPU
zu entlasten
74hc93.pdf 74HC165.pdf
WiderstandFarbCode
{kind=link}
{kind=link}
{kind=link}